Non-woven-tyg har fördelarna att det är lätt och mjukt, giftfritt och antibakteriellt, vattentätt och värmebevarande, god luftgenomsläpplighet och så vidare. Föroreningsgraden av avfall till miljön är bara 10 % av plastpåsar, och det är internationellt erkänt som en miljöskyddsprodukt för att skydda jordens ekologi. Samtidigt har non-woven-produkter korta processer, produktionshastigheter och låga priser, så det används ofta inom jordbruk, industri, heminredning, kläder, särskilt medicin, hälsovård och andra områden, och har en mycket stor inverkan och effekt.
I. Öm punkt på programmet
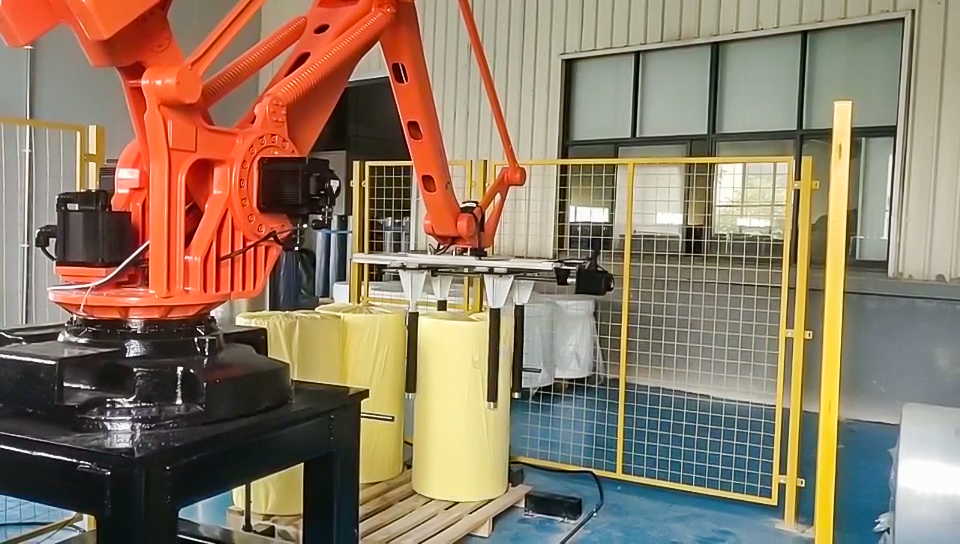
Efter att non-woven-tyget har producerats måste det rullas till en cylinder, sedan transporteras till förpackningsområdet, fixeras med en film och sedan transporteras till lagret för lagring och transport.
Ytan på non-woven-tyg är slät och ömtålig, vilket vid manuell hantering kan leda till palletering, vilket kan orsaka skador på produkten. Samtidigt är vikten av non-woven-tyg som rullas till en cylinder cirka 30–100 kg, och upprepad hantering och stapling av produktionslinjeanställda hela dagen kan lätt orsaka kroppsskador, vilket också påverkar produktionseffektiviteten. För att säkerställa produktkvalitet och produktionseffektivitet har kraven på hantering och palletering av non-woven-tyg ökat kraftigt, vilket kräver ett snabbare, effektivare och säkrare sätt att utföra hanterings- och palleteringsarbetet.
Kunden bestämde sig för att använda Yunhuas intelligenta robot för att ersätta manuell hantering och stapling av non-woven-tyg, för att säkerställa produkternas kvalitet och integritet, för att uppnå fem steg med "produktion, transport, rullning, kodning, lagring" för smidig och snabb drift, för att förbättra produktionseffektiviteten, säkerställa personalens säkerhet och frigöra personalens energi.

II. Lösning
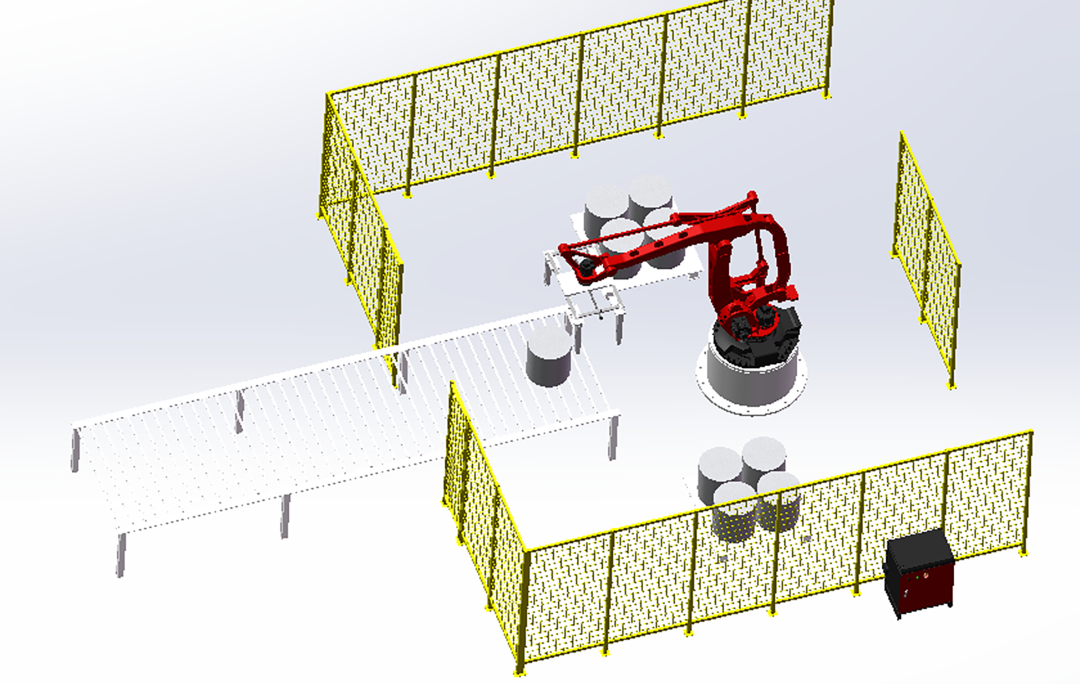
I enlighet med kraven i den befintliga produktionslinjen och produktionsmiljöförhållandena förser vi våra kunder med en hanteringsrobotarbetsstation HY1165B – 315, inklusive förutom robotkropp, bas, kontrollskåp, jiggar och andra tillbehör, även utrustad med produkt- och gjutställ, pallar, säkerhetsstängsel och gallerskyddsutrustning, såsom upprepad positioneringsprecision upp till +/- 2 mm, säker och exakt gripning, effektiv och stabil hantering, palletering, perfekt för att möta kundernas behov av hantering och palletering av non-woven-tyg.
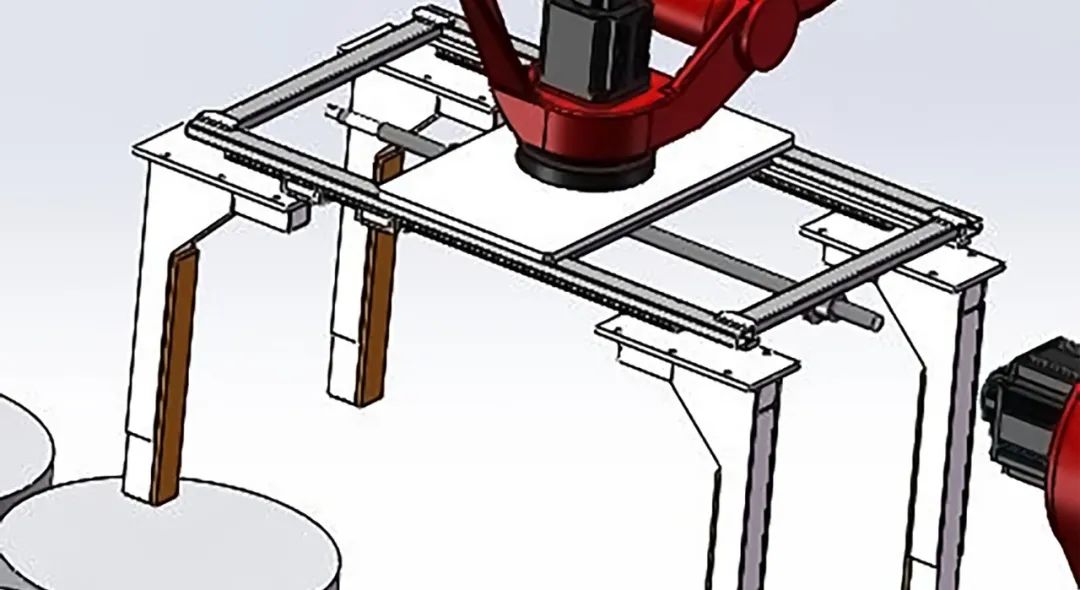
- Gummigripare med dubbelriktad skruvstruktur
Robotgripdonet använder en dubbelriktad skruvmekanism för att styra gripdonet, och för att förhindra att produkter faller av under greppning eller hantering, och för att skydda produkter från skador, är gripdonets yta speciellt tillverkad av gummimaterial, dubbel garanti, säker och pålitlig.
III. Fördelar med systemet
Helautomatisk hantering av kodstämpling
Hy1165b-315 hanteringsrobotarbetsstationen kan helt ersätta manuell hantering och stapling av non-woven material, inte bara för att säkerställa de anställdas personliga säkerhet och arbetsvärde, utan också för att lösa problem med produktkvalitet och integritet, samt förbättra produktionseffektiviteten för hela produktionslinjen för non-woven material.
Dessutom kommer Yunhua intelligent att utföra individuell undervisning och tillhandahålla livslånga underhållstjänster, så att kunderna kan behärska driftmetoden efter enkel utbildning, för att hjälpa kunderna att uppnå "effektiva, säkra och kompletta" automatiska hanterings- och staplingsoperationer.
Yooheart kan erbjuda snabb implementering, säkerhet och effektiva automationslösningar. Fler och fler tillverkare uppströms och nedströms i industrin använder aktivt Muscovite, Mica Muscovitum intelligenta robotar i produktionslinjen för svetsning, montering, hantering, stapling och skärning. Nästa Muscovite, Mica Muscovitum-intelligens kommer att hjälpa fler företag att uppgradera industri-, vetenskaps- och teknikuppdrag. Samtidigt kommer vi att fortsätta dela med oss av mer mogna tillämpningar av intelligenta robotar.
Publiceringstid: 1 mars 2022



